Magnetic Soft Microbots in Biomedicine
Written by Gloria Wang
Robots are often depicted as futuristic, rigid machines made out of steel or other rigid materials. However, recent technology has introduced a new type of robots that can more safely interact with humans: soft microbots. Soft microbots are small, micrometer-scale robots made of materials with flexible structures that allow them to safely interact with humans and manipulate delicate objects in unstructured environments. There are a great variety of options available to power these robots, but the magnetic field offers a safe and effective mean of wireless operation.
The ability of minerals to align with Earth’s magnetic field was first reported in the ancient Chinese manuscripts Han Fei Zi (韓非子) and Gui Gu Zi (鬼谷子), which were written in 3rd and 4th century BCE, respectively, and was later used in early magnetic compasses. In recent years, similar principles have been applied to magnetic soft microbots, allowing them to be much more versatile. The ability of magnetic fields to quickly move or change the shape of these untethered robots allows for much flexibility in structure design and magnetization patterns, as well as accurately calculated models that describe the operation of specific designs.
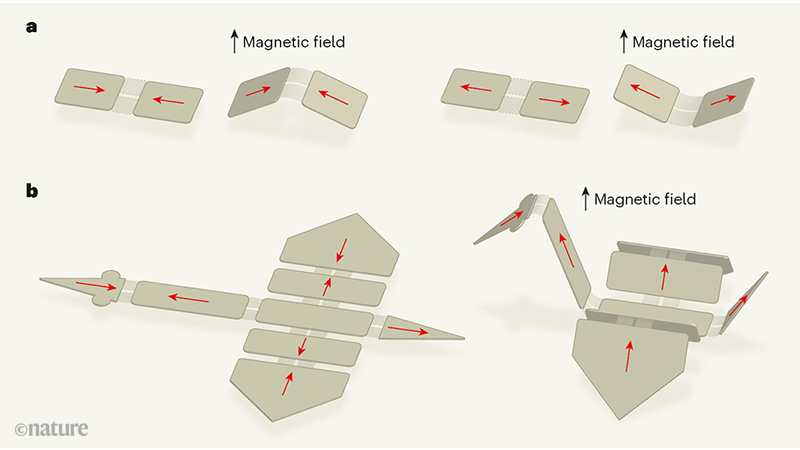
Magnetic soft microbots powered wirelessly through microscopic magnetized panels connected by flexible hinges that, when manipulated, can produce complex movements.
Currently, researchers are working on bringing these magnetic microbots into the field of biomedicine. A team of engineers at Purdue University has developed a microbot that is well suited for navigating inside the human body. These microbots move in a tumbling motion, giving them the name of microscale tumbling magnetic robots (μTUMs), and reduces the field strength needed. The continuously rotating field also gives the μTUMs sustained contact, allowing it to take advantage of the constant frictional forces to climb inclined surfaces. This ability is extremely useful for the near-term objective of using microrobots to perform targeted drug delivery and imaging, as the microbot can traverse the bumpy terrain found in blood vessels and other parts of the human body. The magnetic property of these microbots is of vital importance as magnetic actuation is safe and robust within the human body. The magnetic fields can harmlessly penetrate through living tissue and do not require a specialized environment to function. With modifications, the same equipment used in magnetic resonance imaging (MRI) machines can be used to actuate microrobots.
Although progress has been made in the development of these magnetic soft microbots, much work is still needed to achieve the full potential of these bots for biomedical applications. But researchers are still discovering new methods and developing better models. The team at Purdue says that the next phase of research is to focus on dynamic modeling in order to predict its trajectory on complex terrains as well as real-time imaging and localization for tracking and precise navigation. The rapid development of these soft microbots is laying the foundation for this emerging field. As miniaturization technology advances, in a not-too-distant future, we can envision a world where human ailments can be cured from inside the body without the need for cutting, invasive procedures, or risking potential side effects from drug use.
Zhao, X., & Kim, Y. (2019). Soft microbots programmed by nanomagnets. Nature, 575(7781), 58-59. doi:10.1038/d41586-019-03363-0 https://www.nature.com/articles/d41586-019-03363-0
Chen, Y., Zhao, H., Mao, J. Chirarattananon, P., Helbling, E., & Hyun, N. et al. (2019). Controlled flight of a microrobot powered by soft artificial muscles. Nature. doi:10.1038/s41586-019-1737-7 https://www.nature.com/articles/s41586-019-1737-7
Nathan, S. (2018). Tumbling magnetic microbots have drug delivery potential. The Engineer. Retrieved 14 November 2019, from https://www.theengineer.co.uk/tumbling-magnetic-microbots-drug/
Tumbling Microrobots for Future Medicine. (2018). American Scientist. Retrieved 17 November 2019, from https://www.americanscientist.org/article/tumbling-microrobots-for-future-medicine
1 thoughts on “Magnetic Soft Microbots in Biomedicine”