Swarm Robotics: A New Frontier
Written by: Gautham Anne
Interacting with, understanding, and responding to both each other and the environment are some of the most important features of the human race. The social culture that we possess allows us to help us “advance the human condition.” Interestingly, humans are not the only species that do this.
A flock of birds, a school of fish, and a beehive also exhibit this collective behavior. When birds migrate, they are often in a group led by one member of the flock. The rest of the group arranges itself into particular geometric shapes despite birds having no sense of shapes and figures. In fact, the distribution of the birds is also surprising–—the senior members linger among the edges of the group, while the younger ones are in the center. They do this in order to achieve their common goal: migrate safely.
These same characteristics are found in fire ants; they are coordinated enough to build, eat, and defend their colony together. They can even go as far as creating a small bridge for crossing a gap!
Figure 1

Source: Google
This collective behavior allows groups to achieve more despite their circumstances and constraints. Researchers have shown that individuals within these complex groups need not have sophisticated knowledge. The ‘swarm’ knowledge is distributed across all of the members of the group. Each unit in the swarm has a certain amount of intelligence along with natural instinct of course. Members have the ability to learn new skills over time. This raises the question: what if this collective sensing can be implemented with a group of robots? This article presents the fundamental concepts of swarm robotics.
Biomimicry
Many researchers and engineers have taken nature to be an inspiration for their innovations. For example, the solution to the difficult engineering problem of designing the nose of the bullet train was inspired by the beak of the kingfisher. Modeling the shape of the beak of the kingfisher made the train more energy-efficient and produced relatively less noise as it passed through tunnels. The term coined for taking inspiration from nature to solve problems faced in the scientific community is called “biomimicry”.
Figure 2

Bullet train and kingfisher
Source: Google
Much of swarm robotics research has elements of biomimicry. One example is the development of small autonomous robots that can navigate through earthquake destruction in search of human life. This technique is quite similar to swarms of insects. Biomimicry is the inspiration of swarm robotics.
Essentially, swarm robotics is a field of multi-robotics in which a large group of robots is coordinated and distributed in a decentralized manner. Each robot follows simple, local rules, inspired by the collective behavior of social insects, so large amounts of simple robots can outperform a task given to a single, complex robot.
Requirements
If swarm robotics is to be efficient and applicable to a variety of situations, certain requirements must be met. The swarm of robots must be autonomous and able to sense and interact with a realistic environment and the number of bots in a swarm must be large enough to complete a given task in a certain timeframe, but not overcompensated for that the efficiency of the system experiences a loss. Homogeneity must exist in a swarm; that is, the robots in a swarm must be similar, if not the same. This makes algorithms easier to implement. A single robot must be incapable and inefficient with respect to the swarm’s main objective. This is the entire point of swarm robotics – many simple robots working together to complete an objective. All robots must only have local sensing and communication capabilities with neighboring bots. This ensures that the coordination of the swarm is distributed evenly and incorporates scalability into the system.
Figure 3
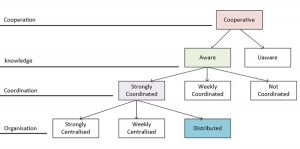
Swarm robotics algorithm requirements
Source: Google
Advantages of Multi-Robot systems compared to Single Robots
There are numerous advantages of multi-robot swarms compared to single robots. Firstly, a swarm has the ability to use task parallelism to perform the task more efficiently. Task enablement is another factor – some tasks require multiple robots because of their nature. Working as a swarm allows a group of bots to complete a task that would be otherwise impossible for a single robot to complete. As a swarm has collective sensing capabilities, it has a wider sensing range than that of a single robot. This is especially useful in searching objectives since a wider sensing range would help the robots scan an area faster. A group of robots can also actuate a variety of actions at different places at the same time, which is generally known as the distribution of action. Finally, one of the most important advantages of a swarm over a single bot is fault tolerance – the failure of a single robot within a swarm does not compromise the main objective, since other robots still function.
Current Experimental Platforms
The SwarmBot, developed by Rice University, is a platform developed for research in swarm robotics. It can run for approximately 3 hours on a single charge and uses a variety of sensors, including cameras, to detect the environment.
Figure 4

Source: Google
Harvard University developed the innovative Kilobot, which uses vibrations to move the system’s body. It is also unique with the function of group charging and group programming. Due to its simplicity, it has a runtime of 24 hours.
Figure 5

Source: Google
Developed by the KOVAN Research Lab at Middle East Technical University, Kobot has multiple vision sensors, distance sensors, and a compass. It can work autonomously for 10 hours on a single charge and is mostly used in the implementation of self-organization situations.
Figure 6

Source: Google
École Polytechnique Fédérale de Lausanne (EPFL) developed the S-bot, one of the most competent swarm platforms built. It has a unique design, with a gripper capable of interacting with other objects and S-bots, and uses various sensors, such as light intensity, IR, acceleration, and temperature sensors, among many more.
Figure 7
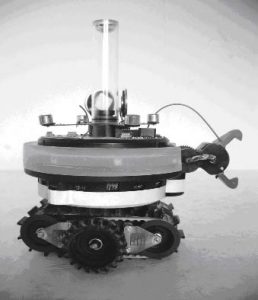
Source: Google
There are numerous types of swarm robots, each with its own specific characteristics that make them appealing to certain tasks. For instance, the S-bot is more beneficial in objectives that require swarms to manipulate the environment, since it has a gripper. However, it is costly to manufacture, and the Kilobot, which is significantly cheaper, would be the better alternative for objectives that do not require manipulation of the environment.
Algorithms and Techniques
There are various techniques utilized in swarm robotics, and they form the initial steps to solve complex problems.
Aggregation is the process of grouping all of the bots in a swarm together, and it is a fundamental part of pattern formation, self-assembly, exchange of information, and other collective movements. After the aggregation step, the dispersion algorithm steps in. Each robot is disrupted in its environment and works as a single member of the swarm, while also having the ability to explore the environment individually. One approach to dispersion is the repulsion algorithm, where robots ‘repel’ each other and obstacles, allowing them to disperse in the environment linearly. Pattern formation is a major characteristic of swarm behavior and can be helpful in tasks that require the entire group to work together. For example, robots can create a global shape by changing the position of individual bots using local information.
Figure 8

Source: Google
There are many more algorithms and techniques that a swarm must be able to follow if it can complete a task successfully, including the allocation of tasks, collective movement, object transportation, and collective mapping.
Conclusion
Swarm robotics is a promising field, with many real-world applications, such as medical uses and search and rescue missions. However, there are many challenges researchers need to address before they can be commercialized. Extensive testing in laboratory settings and standards is a must, especially for high-risk scenarios. Building mathematical models and analyzing swarm algorithms is extremely challenging. There are further security concerns that need to be addressed due to the individual bot’s simplicity, such as the physical capture of the robots, identification of individuals in a swarm, and communication attacks. The main goal of swarm robotics is to cover a wide range of applications where robots can disperse and perform their respective tasks. Some examples include the detection of hazardous events, such as leakages and landmines. Overall, the application of swarm robotics is propitious, but much work has to be done regarding the development of algorithms and mathematical models.
References and Sources
Dorigo, M., Birattari, M., & Brambilla, M. (2014). Swarm robotics. Scholarpedia, 9(1), 1463. doi: 10.4249/scholarpedia.1463
Navarro, I., & Matía, F. (2013). An Introduction to Swarm Robotics. ISRN Robotics, 2013, 1-10. doi: 10.5402/2013/608164
Schranz, M., Umlauft, M., Sende, M., & Elmenreich, W. (2020). Swarm Robotic Behaviors and Current Applications. Frontiers In Robotics And AI, 7. doi: 10.3389/frobt.2020.00036
Tan, Y., & Zheng, Z. (2013). Research Advance in Swarm Robotics. Defence Technology, 9(1), 18-39. doi: 10.1016/j.dt.2013.03.001